基本资料
尚祖峰 特聘副教授,硕士生导师
教育经历:
2015.09-2021.06,天津大学,工学博士(直博)
2019.09-2020.09,根特大学,联培博士(比利时)
2013.03-2015.07,南开大学,经济学学士
2011.09-2015.07,天津大学,工学学士
工作经历:
2021.07至今, 必赢242net官网
2023.06-2023.12,中科院香港创新研究院,访问学者
学术兼职:
Mechanism and Machine Theory,Textile Research Journal,Journal of Mechanical Engineering Science等多个国际期刊审稿人
本科生教学:
主讲电路原理、机器人入门等课程
指导本科生获批国创、新苗、校科创等研究项目
主要研究方向
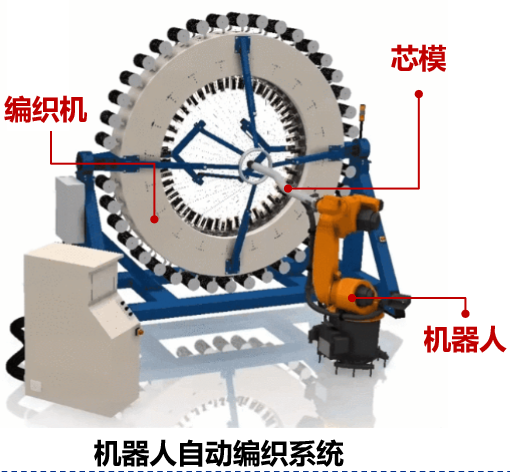
● 机器人辅助编织(Robot-assisted Braiding)
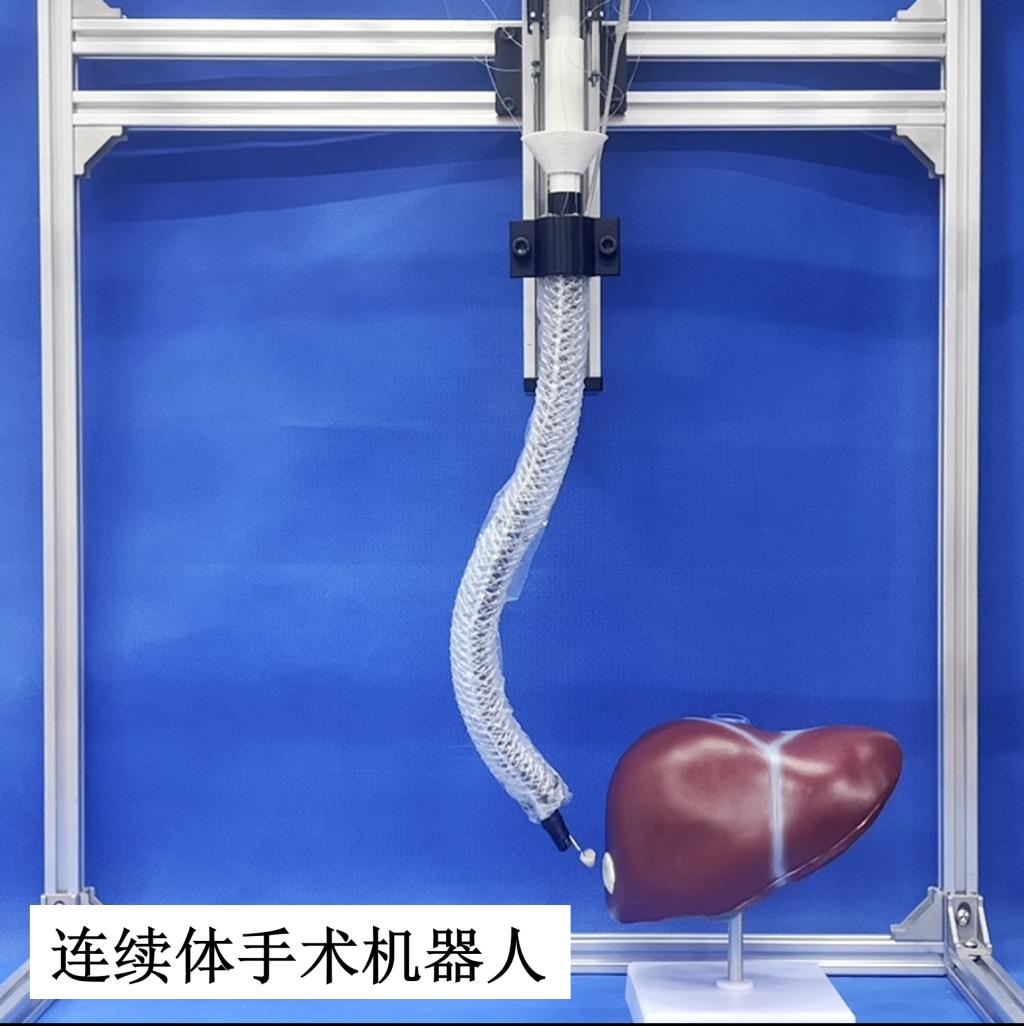
● 连续体机器人(Continuum Robots)
● 微创手术器械(Surgical Devices)
获奖情况
1. 天津大学优秀毕业生(本科生、博士生) 2015.7/2021.06
2. 天津大学优异生(提前保研资格) 2013.12
科研项目
1. 国家自然科学基金(青年),面向自然腔道手术器械的可折展导管结构设计与刚度调控机理研究,2025.01-2027.12,主持
2. 浙江省自然科学基金(青年),经自然腔道手术器械入路载体的仿蚯蚓蠕动置入机理研究,2025.01-2026.12,主持
3. 浙江省教育厅一般项目,织物基软体抓手刚柔转换与折展驱动机理研究,2023.10-2025.10,主持
4. 必赢242net官网校级项目,变刚度连续机器人的功能耦合设计研究,2021.10-2026.09,主持
5. 国家自然科学基金(联合),大型变曲率结构件编织机器人装备设计理论与方法,2024.01-2027.12,参与
6. 国家自然科学基金(重大),精准微创手术器械创成与制造基础,2013.01-2017.12,参与
发表论文
1. Shang Z*, et al.A braided overtube with variable diameter and stiffness towards natural orifice transluminal endoscopic surgery [J].IEEE Robotics and Automation Letter, 2025, under review.
2. Shang Z*,et al. A variable-stiffness continuum manipulator using fibrous structure: design, modelling and validation [J].IEEE Transactions on Mechatronics, 2025, under review.
3. Shang Z*, et al. Modeling and constant-curvature design of a 120ospirally notched neurosurgical device using finite element method [J].Archive of Applied Mechanics, 2025, under review.
4. Shang Z*, et al. Research on effects of braiding process on the composite preform quality using finite element method [J].Journal of Reinforced Plastics and Composites, 2024, published online.
5. Shang Z*,et al. Flexible furniture structure based on braiding technology and fiber jamming[J].Mechanics of Advanced Materials and Structures, 2024, 31(28):10735-10744.
6. Shang Z*, et al. Bending stiffness characterization of braided stent using spring-based theoretical formula[J].Archive of Applied Mechanics, 2023, 93(3):947-960.
7. 尚祖峰*,马家耀,王树新.面向微创手术器械臂的可变刚度机理综述[J].机械工程学报, 2022, 58(21):1-15.
8. Shang Z, et al. Lateral indentation of a reinforced braided tube with tunable stiffness,Thin-walled Structures, 2020, 149:106608.
9. Shang Z, et al. A foldable manipulator with tunable stiffness based on braided structure[J].Journal of Biomedical Materials Research Part B-Applied Biomaterials, 2020, 108(2):316-325.
10. Shang Z, et al. Self-forcing mechanism of the braided tube as a robotic gripper[J].Journal of Mechanisms and Robotics, 2019, 11(5):051002.
11. Shang Z, et al. A hybrid tubular braid with improved longitudinal stiffness for medical catheter[J].Journal of Mechanics in Medicine and Biology, 2019, 19(3):1950003.
12. Shang Z, et al. A braided skeleton surgical manipulator with tunable diameter[C].8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics, New York, 2020:223-228.
13. Li Z,Shang Z, Zappa E, et al. Yarn level finite element method simulation for bending over sheaves of braided ropes[J].Journal of Industrial Textiles, 2023, 53.
14. Ren X, Zhang G,Shang Z, et al. A variable stiffness spring–sponge composite tube with fast response and shape recovery[J].Macromolecular Materials and Engineering, 2018, 303(10):1800185.
15. Li J, Zhang Z, Wang S,Shang Z, et al. A specimen extraction instrument based on braided fiber tube for natural orifice translumenal endoscopic surgery[J].Journal of Medical Devices, 2018, 12(3):031008.
16. 张国凯,马家耀,尚祖峰,等.具有折展与变刚度特征的NOTES手术器械臂[J].机械工程学报,2018, 54(17):28-35.
专利情况
1. 孙丞睿,黄鹏恺,王正午,尚祖峰,一种可变刚度的薄片状柔性编织抓手,申请号: 202510181965.3,发明专利,申请日: 2025.02.19.
2. 尚祖峰,沈雪峰,殷乐,葛子华,一种水温驱动的柔性手术器械可折展导引管,申请号: 202411679347.3,发明专利,申请日: 2024.11.22.
3. 王成海,葛宇,尚祖峰,一种通过抛/收绳索实现移动的机器人及机器人移动方法,申请号: 202411134718.X,发明专利,申请日: 2024.08.19.
4. Wang Shuxin, Ren Xuyang, Zhang Guokai, Shang Zufeng, Li Jinhua, Sponge-based variable-stiffness natural orifice surgery instrument support structure and use method, Patent Number: 12016537B2, US Patent, Authorized Data: 2024.06.25.
5. 胡兴涛,陈嘉睿,周智凯,程小琳,尚祖峰,一种直径可变的编织式管状柔性臂驱动装置,申请号: 202410348437.8,发明专利,申请日: 2024.03.26.
6. 尚祖峰,李秦川,吴震宇,陈嘉睿,严博,一种具有双锭子盘的径向环形编织机,申请号: 202410179326.9,发明专利,申请日: 2024.02.18.
7. 尚祖峰,李秦川,吴震宇,周智凯,严博,一种具有双锭子盘的轴向环形编织机,申请号: 202410179325.4 ,发明专利,申请日: 2024.02.18.
8. 尚祖峰,胡兴涛,程小琳,一种编织式自然腔道手术器械臂及其径向逐序展开方法,申请号: 202410153871.0,发明专利,申请日: 2024.02.04.
9. 尚祖峰,耿嘉旭,胡兴涛,一种流体压力驱动的可折叠软体操作臂,申请号: 2023112596950,发明专利,申请日: 2023.09.27.
10. 尚祖峰,周智凯,胡兴涛,陈嘉睿,冯云颖,一种通过电磁驱动的编织式柔性驱动器系统,申请号: 202311119489.X,发明专利,申请日: 2023.09.01.
11. 尚祖峰,陈嘉睿,胡兴涛,周智凯,冯云颖,一种用于软体机器人的多级纤维阻塞变刚度织物结构,申请号: 202311080348.1,发明专利,申请日: 2023.08.25.
12. 尚祖峰,胡兴涛,陈鑫磊,一种管状薄壁连续体结构及柔性机械臂,申请号: 202211588647.1,发明专利,申请日: 2022.12.09.
13. 王树新,尚祖峰,任旭阳,一种自然腔道手术用可展变刚度蛇形载体,授权号: ZL201710578595.2,发明专利,申请日: 2017.07.17.
14. 王树新,马家耀,尚祖峰,由衷,一种用于自然腔道手术的折展变刚度器械臂,授权号: ZL201710628109.3,发明专利,申请日: 2017.07.27.
15. 王树新,刘开元,尚祖峰,李进华,一种用于自然腔道手术的变刚度保护鞘及其应用方法,授权号: ZL201710579699.5,发明专利,申请日: 2017.07.17.
16. 隗巧,邢元,尚祖峰,一种微创手术器械传动丝的寿命预测方法,申请号: 202310168678.X,发明专利,申请日: 2023.02.23.
17. 王树新,任旭阳,张国凯,尚祖峰,李进华,基于海绵的变刚度自然腔道手术器械支撑结构及使用方法,授权号: ZL201810374716.1,发明专利,申请日: 2018.04.24.
18. 王树新,任旭阳,张国凯,尚祖峰,李进华,变刚度自然腔道手术器械支撑结构及使用方法,授权号: ZL201810361061.9,发明专利,申请日: 2018.04.20.
19. 王树新,尚祖峰,任旭阳, Expandable serpentine carrier with variable rigidity for natural orifice transluminal endoscopic surgery and method for using the same,申请号: PCT/CN2018/088647, PCT国际专利,申请日: 2018.05.28.
20. 王树新,任旭阳,张国凯,尚祖峰,李进华, Support structure for rigidity-variable natural orifice surgical instrument and rigidity control method for support structure,申请号: PCT/CN2018/101918, PCT国际专利,申请日: 2018.08.23.
联系方式
● 通讯地址:浙江省杭州市钱塘区必赢242net官网15楼225室
● Email: zufeng_shang@zstu.edu.cn Wechat: keizer2019




 师资队伍
师资队伍